Challenge 2026
Aim of this challenge
Humanoid Virtual Athletics Challenge is a simulation-based robotics challenge aiming at co-learning of motion planning and control techniques for humanoid and legged robots. Since HVAC2021, many teams from beginners to experts participated and showed various exciting performances. HVAC2026 calls for participation of enthusiasts in three challenge categories athletics, dance, and short track.
Important Dates of 2026
- Team registration period: until approximately 1 week prior to the main challenge
- Simulation result submission period: same as above
- Main Challenge: September 1st, 2026, to be held as part of RSJ2026 open forum
How to participate
- Register your team information through this appllication form. Upon acceptance of registration, you will receive a link for uploading simulation log data.
- There are two ways to participate in the challenge: [1] submit simulation log data during the submission period, and [2] perform simulation during the main challenge event.
- Qualified simulation results will be listed in the challenge web page. A team which achieved a milestone will be awarded during the main challenge event.
Challenge Themes
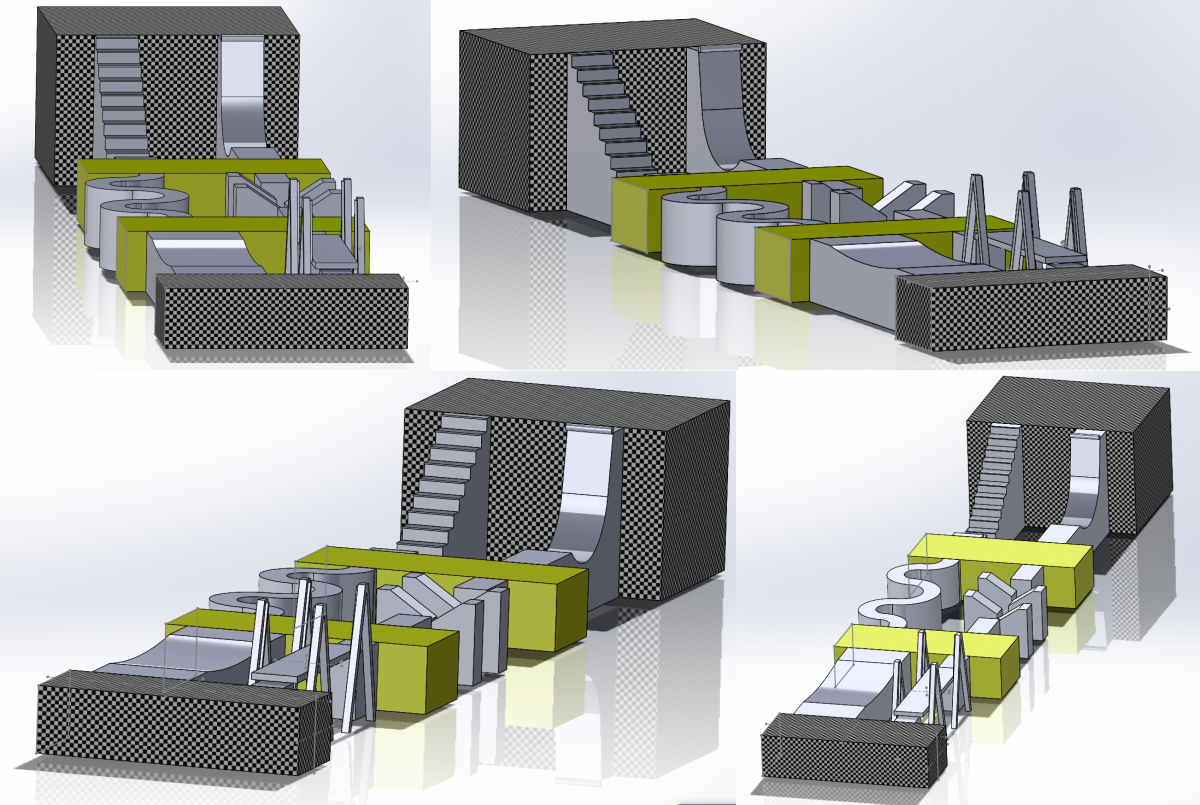
Athletics
The robot traverses the athletic field from the starting position to the goal. Performance is evaluated by reached landmark and elapsed simulation time.
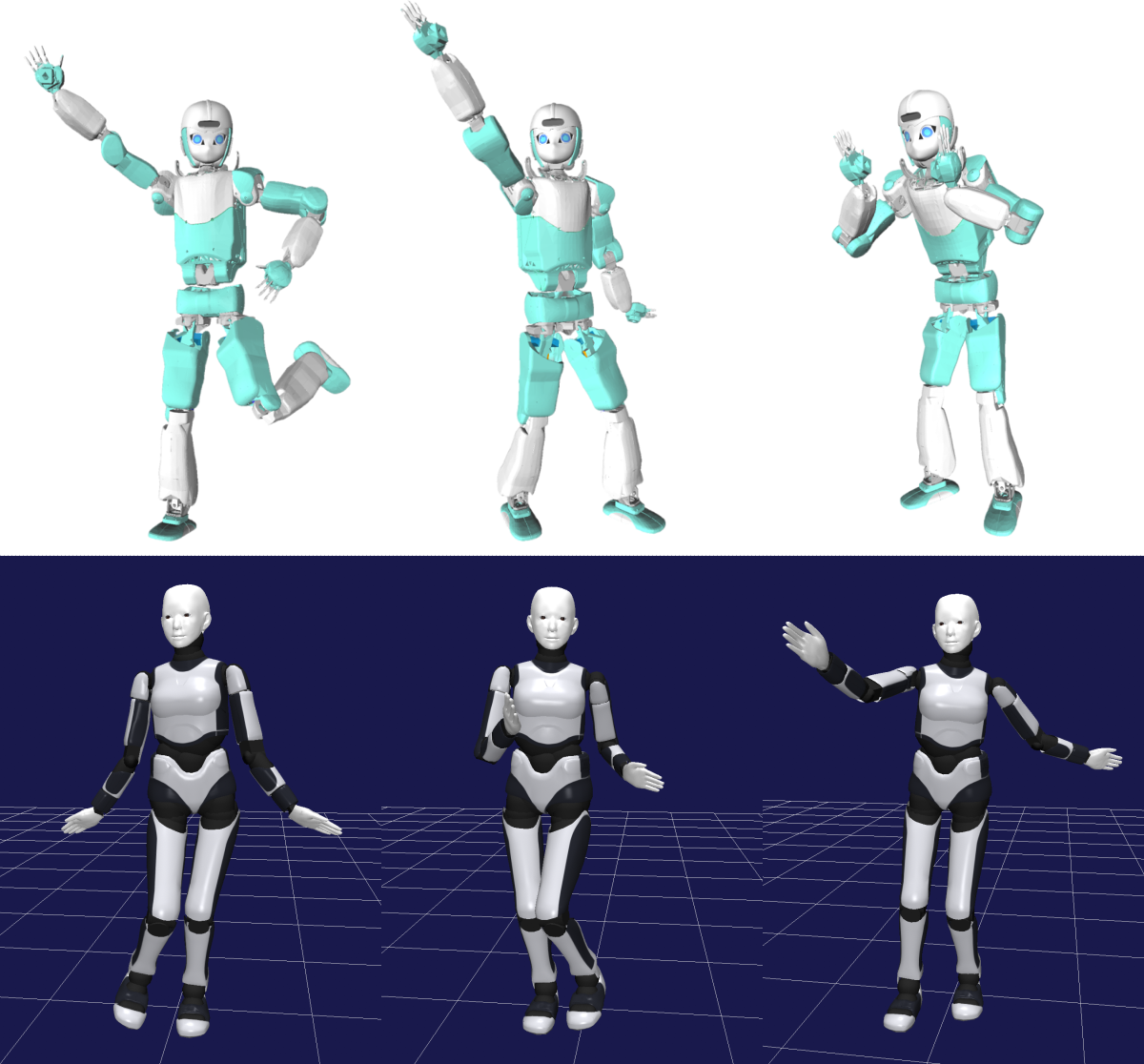
Dance
The robot performs dancing that requires whole-body motion. Dance performance is evaluated in terms of both artistic quality and technical quality.
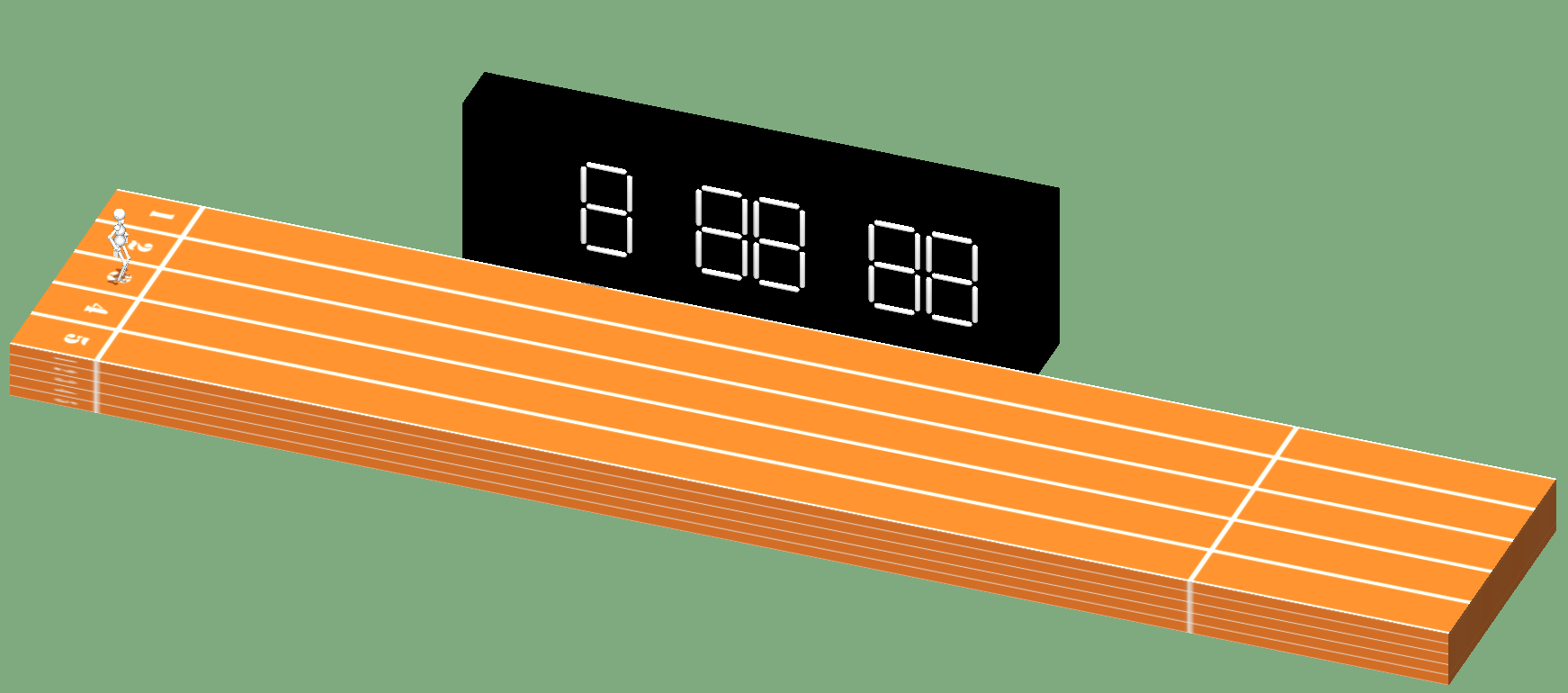
Sprint
The robot walks/runs the 20[m] short track. Performance is evaluated by elapsed simluation time while the robot passes the start line and the goal line.
Regulation
Detailed regulation
Please see the following document for detailed regulations. Regulations are tentative and subject to change.
Quick Start
- See README of vnoid for quick instructions.
Committee
- HVAC2026 is hosted by the Special Interest Group on Humanoid Robotics of the Robotics Society of Japan (RSJ-SIG-HR).
- HVAC2026 is run by volunteers consisting of members and non-members of RSJ-SIG-HR.
- Commitee members
- Yuichi Tazaki (Kobe Univ.)
- Takumi Kamioka (Stealth Startup)
- Tomomichi Sugihara (OMRON Corp.)
- Masaki Murooka (AIST)
- Kenji Hashimoto (Waseda Univ.)
- Ikuo Mizuuchi (Tokyo Univ. of Agriculture and Technology)
- Yohei Kakiuchi (Toyohashi Univ. of Technology)
- Shin’ichiro Nakaoka (Choreonoid)
- Soh Yukizaki (Kawasaki Heavy Industries)
- Kunio Kojima (Univ. of Tokyo)
- Taiki Ishigaki (Tokyo Univ. of Science)
- Commitee members
Asking Questions
- Post your question at https://github.com/ytazz/vnoid/discussions